
project 1
I-Seed (EU Project)
The intelligent biodegradable soft robots that mimic plant seed behaviour

Motivation
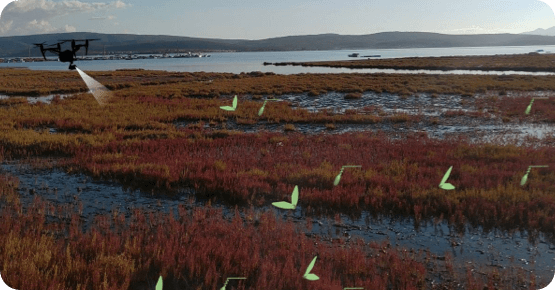
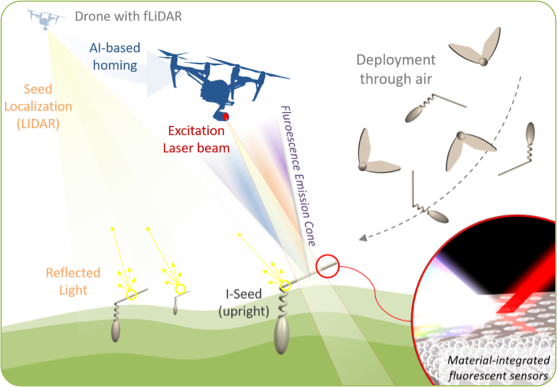
I-Seed aims at developing a new generation of self-deployable and biodegradable soft miniaturised robots, inspired by the morphology and dispersion abilities of plant seeds, to perform a low-cost, environmentally responsible, in-situ detection of key environmental parameters in air and topsoil. With the ability to fly and disperse via natural vector-mediated diffusion in air, the multifunctional seed-like robots will also be able to respond to humidity variations to move on terrain surface and self-penetrate in topsoil for in situ measurements.
Innovation
The project received the full requested funding (€ 3 997 521.25) under the Future and Emerging Technologies (FET) Proactive Environmental Intelligence call (FETPROACT-EIC-08-2020) of Horizon 2020, the EU framework programme for research, innovation and boosting emerging technologies, in subtopic B: Radically novel approaches to resilient, reliable and environmentally responsible in-situ monitoring, which looks for ground-breaking concepts for the monitoring, analysis and management of critical resources in Europe.
The project involves a transnational, multi-disciplinary and multi-sectoral consortium composed of six partners from Italy, Germany, The Netherlands, and Cyprus, with an aim to deliver a blueprint for a full-fledged system for Environmental Intelligence. The research teams combine different scientific and technological skills from (bio)engineers, biologists, material scientists, computer scientists, mathematicians, roboticists, and environmental scientists with an aim to increase the links for a new community of biorobotics for the environment, to develop innovative artificial “green” solutions with a science-based approach inspired by Nature, to monitor and safeguard the environment, and to gain a better understanding of natural phenomena.
By merging scientific research and technological design across the areas of bioinspired robotics, material science, artificial intelligence, mathematical modelling and hyperspectral imaging, I-Seed will build a radically new dynamic scenario for analysing and monitoring air and topsoil environments and their interface, extend environmental sensor networks and fill existing gaps in data analysis systems. Olyseus Innovations is leading the development of the embedded real-time data processing capability of the UAV fluorescent LiDAR system. To achieve this task, Olyseus is integrating its Fast-Copier, ODB and Olypoint technologies to deliver the fastest I/O operations through an optimised geospatial database, ensuring the widest bandwidth possible for on-board data transfer and processing. The fluorescent LiDAR will need to be able to detect the miniaturised soft robots. In order to do this, the on-board computer will have to analyse the LiDAR signal for traces of the soft robots’ spectral signature. This signal analysis will rely on Machine Learning technology. Upon discovery of a signature, its precise spatial position will need to be evaluated and the drone will be tasked to calculate a new flight path to get closer to the target to acquire a better reading. This on-the-fly re-routing, or flight path adjustment, of the UAV will be achieved with the development by Olyseus of an intelligent autonomous flight controller.
Get in touch with us about your project
project 2
Smart Annotation
The automated media annotation
Motivation
In collaboration with a Singaporean company, we are developing a set of technologies to support the Singapore government’s Smart Nation initiative. One of the pillars of Smart Cities is to detect and track changes or anomalies that can randomly occur in an urban landscape. Such detection can only be achieved efficiently with Machine Learning (ML).
ML is a data-based technology that is designed to detect patterns and trends within big data sets. In this case, to teach a machine how to detect changes, we need to first feed the machine with a huge amount of data to show it what is normal and what is not.
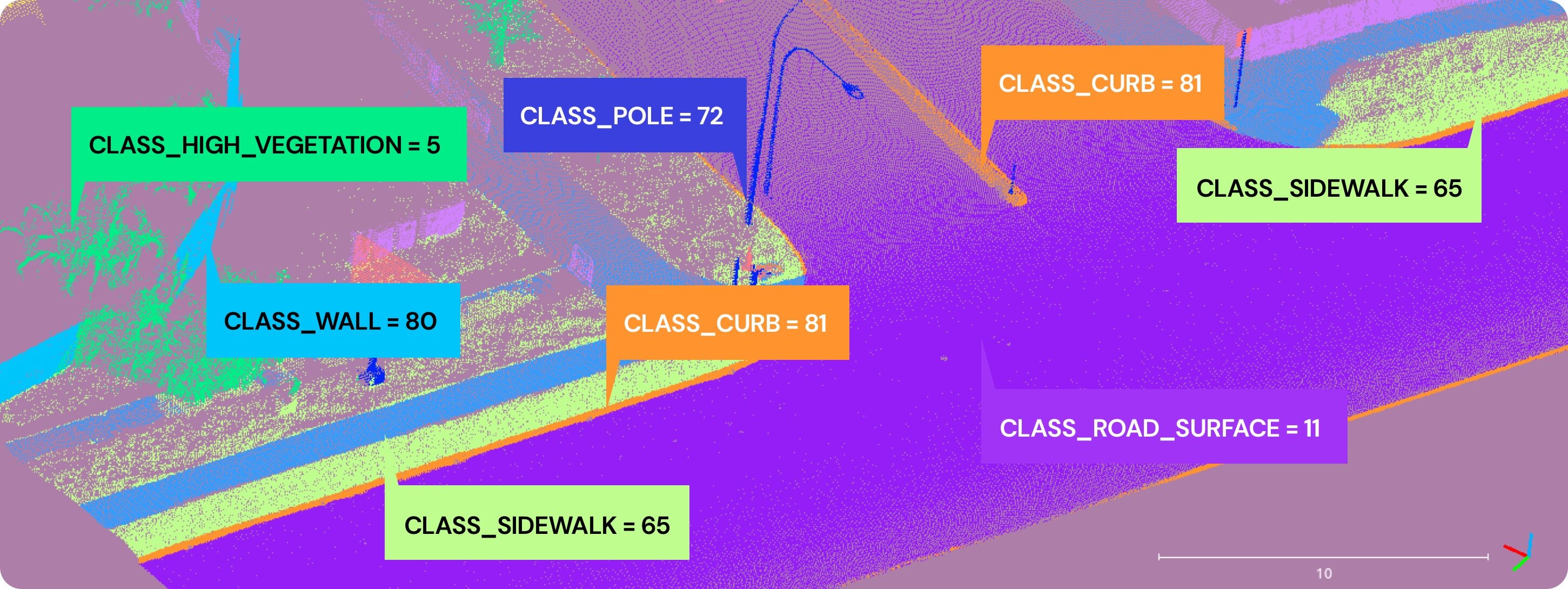
These training sets usually need to be created. For each task, a specific set of data is needed in order to train and generate a specific ML model. This usually consists of taking an image and annotating it, through which it explains the meaning of each pixel of that image- the “meta-data” layer. The image annotation process is typically a tedious and time-consuming manual process.
However, we have developed a technology that can pre-annotate images by generating editable meta-data layers. Consequently, these meta-data layers can be reviewed and, if needed, edited. Our technology has proven an impressive 50% increase in production rates, which of course vastly reduces production costs.
Innovation
Olyseus Innovations has developed an agnostic TPU engine that offers an equation parser and a code generator tool that can evaluate the partial derivatives of any system and produce the CPU and/or GPU sources code that are subsequently compiled into binary code to be run against the data to evaluate its TPU values.
Riegl International, who were one of our first clients, is a world-renowned LiDAR company specialised in the development and production of laser scanners, rangefinders and distance meters. They were one of our first clients. Since 2018, we’ve been working with them to develop and implement a flexible and versatile engine to estimate the Total Propagated Uncertainty (TPU) of their Airborne Bathymetric LiDAR systems.
Get in touch with us about your project
Project 3
TPU Engine
Measure with more confidence
Motivation
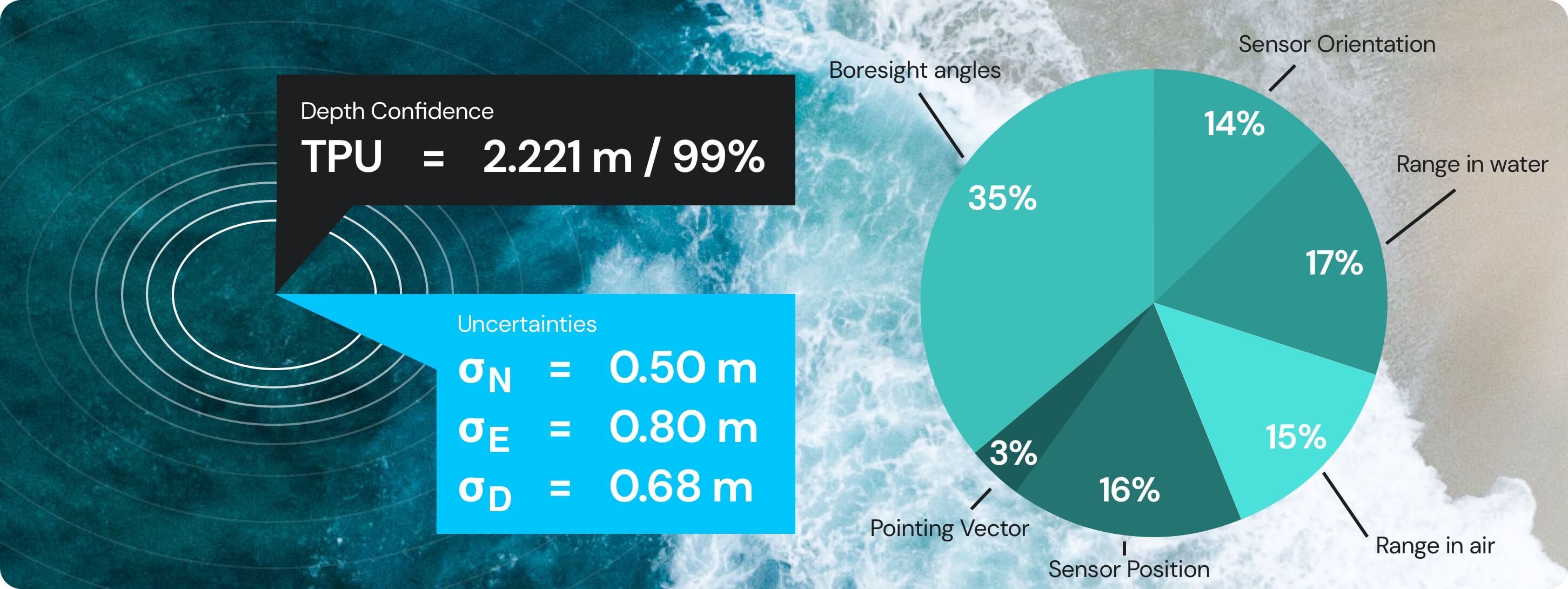
The TPU, or Total Propagated Uncertainty, is a way to express the confidence level of a measurement, like a depth measurement from a Bathymetric LiDAR system.
In the field of Airborne Bathymetric LiDAR (ABL), the Total Propagated Uncertainty is a fundamental concept and product that is now a mandatory deliverable, when conducting a bathymetric airborne data acquisition campaign, as per Standard 44 from the International Hydrographic Organisation (IHO). The Total Propagated Uncertainty, or error budget, is an estimation of the accuracy to be expected for every laser sounding, i.e., LiDAR point, when all relevant error and uncertainty sources are taken into account. The uncertainty sources can originate from a system in of itself or from the environment. The uncertainty is either random or constant, and their sources can be the GPS position and its accuracy, a gyroscope’s heading, pitch, roll measurements and their accuracies, internal and external lever arms offsets, the laser scanning mechanism and its potential internal misalignments, the air/water topography, or the water column turbidity, just to name a few.
Considering that every LiDAR sounding is an uncorrelated random variable with normally distributed uncertainty, and also considering that every uncertainty source is independent from each other, the covariance terms can be disregarded, and thus the TPU can be estimated statistically using the General Law of Propagation of Variance (GLOPOV).
The GLOPOV law stipulates that for a system, like a bathymetric LiDAR system, its total propagated variance can be expressed as a linear algebra product of the Jacobian matrix times the Covariance matrix times the transpose of the Jacobian matrix. The values inside these matrices are specific to a system, i.e., a specific bathymetric LiDAR system, and can be quite complex and tedious to evaluate.
Innovation
Olyseus Innovations has developed an agnostic TPU engine that offers an equation parser and a code generator tool that can evaluate the partial derivatives of any system and produce the CPU and/or GPU sources code that are subsequently compiled into binary code to be run against the data to evaluate its TPU values.
Riegl International, who were one of our first clients, is a world-renowned LiDAR company specialised in the development and production of laser scanners, rangefinders and distance meters. They were one of our first clients. Since 2018, we’ve been working with them to develop and implement a flexible and versatile engine to estimate the Total Propagated Uncertainty (TPU) of their Airborne Bathymetric LiDAR systems.